Alle guten Dinge sind drei: Ein neuer Anlauf zur Bergung des Dampfschiffs Säntis
Romanshorn, 08.06.2024 – Wie Albert Einstein sagte: „Wer noch nie einen Misserfolg hatte, hat noch nie etwas Neues versucht.“ Der Schiffsbergeverein wagt einen dritten Versuch, das Dampfschiff Säntis zu bergen. Damit beginnt man fast auf dem ersten Spielfeld, da die Bergeplattform zerstört wurde. Nur die vier Hebeleinen, die unter dem Wrack noch liegen, und eine Menge Erfahrung bleiben.
Trotz zahlreicher Hindernisse wie einem Spendekrimi im letzten Jahr, bei dem während einer viermonatigen Crowdfunding-Kampagne die Finanzierungsschwelle erst wenige Stunden vor Ablauf der Aktion erreicht wurde, widrigem Wetter, starken Unterwasserströmungen, Personalengpässen, bürokratischen Genehmigungen und technischen Herausforderungen hat das Team des Schiffsbergevereins das Projekt „Hebung des Dampfschiffs Säntis“ mit grosser Entschlossenheit vorangetrieben. Am Sonntag, den 26. Mai 2024, kam es jedoch zu einem Vorfall, der die Bergung scheitern liess, als die Bergeplattform zerstört wurde.
Der Schiffsbergeverein hat aufgrund der überwältigenden Resonanz aus der Bevölkerung aller drei Anrainerstaaten beschlossen, einen neuen Anlauf zu wagen. Dabei werden die beiden wichtigsten Lektionen aus den bisherigen Versuchen berücksichtigt:
- Ein derart komplexes Projekt kann nicht ausschliesslich mit Freiwilligen durchgeführt werden. Professionelle Unterstützung ist unerlässlich.
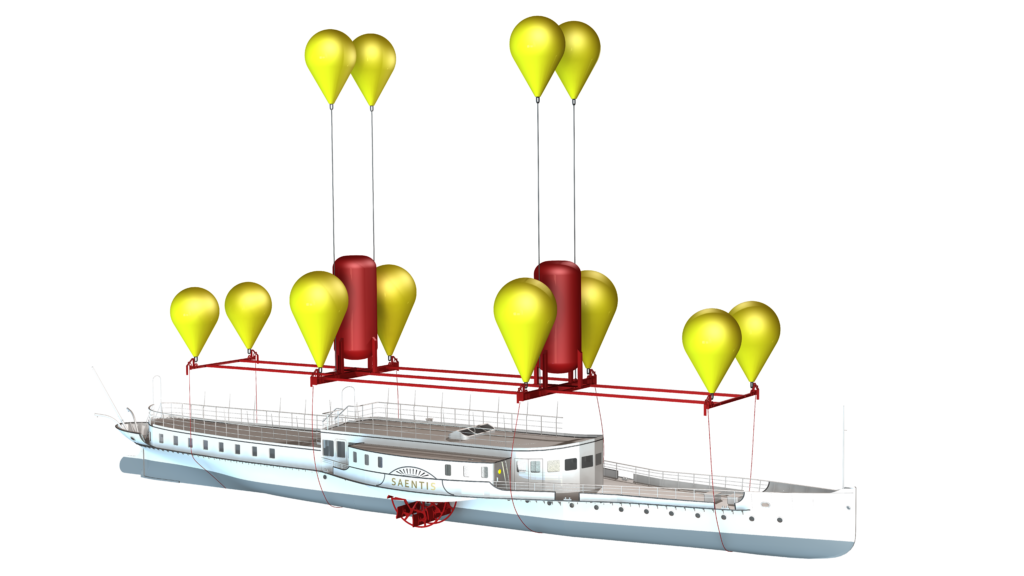
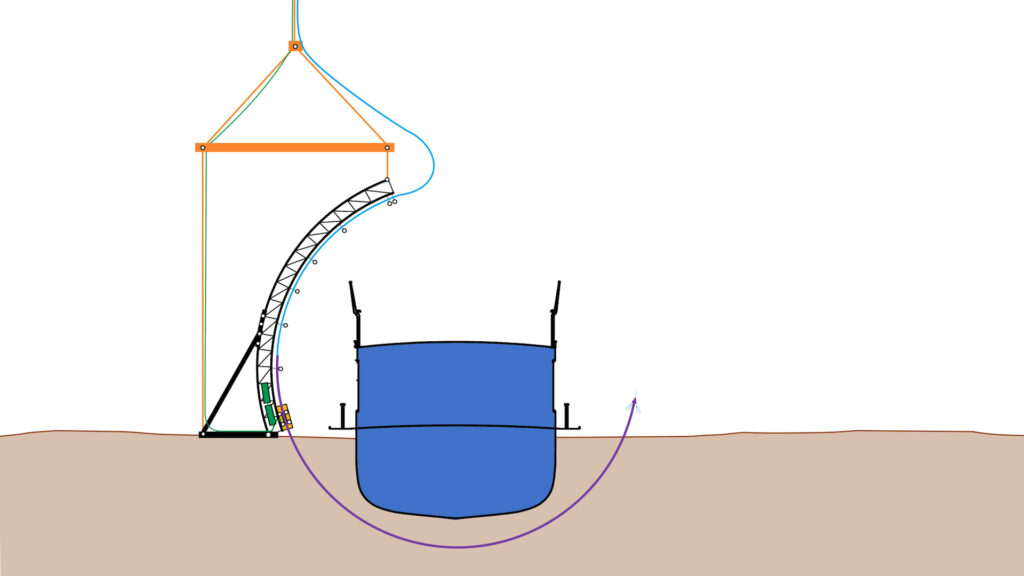
- Es müssen ausreichend finanzielle Ressourcen vorhanden sein, um das richtige Material zu beschaffen und den reibungslosen Ablauf der Bergung zu gewährleisten. Beim neuen Anlauf würden Litzenheber eingesetzt.
Der Verein ist zuversichtlich, dass wir mit diesen Anpassungen und der anhaltenden Unterstützung der Öffentlichkeit das Dampfschiff Säntis erfolgreich bergen können. Als erstes beginnt nun das Crowdfunding erneut mit der Raiffeisenbank auf www.lokalhelden.ch/bergung-saentis . Auch die Bank hat zugesichert, dass die normale maximale Spendensammelzeit von drei Monaten bis zum 31. Januar 2025 verlängert werden kann. Wir sind gespannt, ob wir es schaffen werden.
Die Details für unser Vereinskonto sind wie folgt:
Schadenplatz (aus 210m Tiefe):
Der Zeitplan
Alle Angaben sind unverbindlich, da der Zeitplan aufgrund technischer, wetterbedingter oder personeller Einschränkungen variieren kann.
| Jetzt | Entfernen des Bergematerial aus dem See |
| bis 31.01.2025 | Crowdfunding für dritter Bergeversuch mit Litzenheber |
Tauchroboterfamilie:
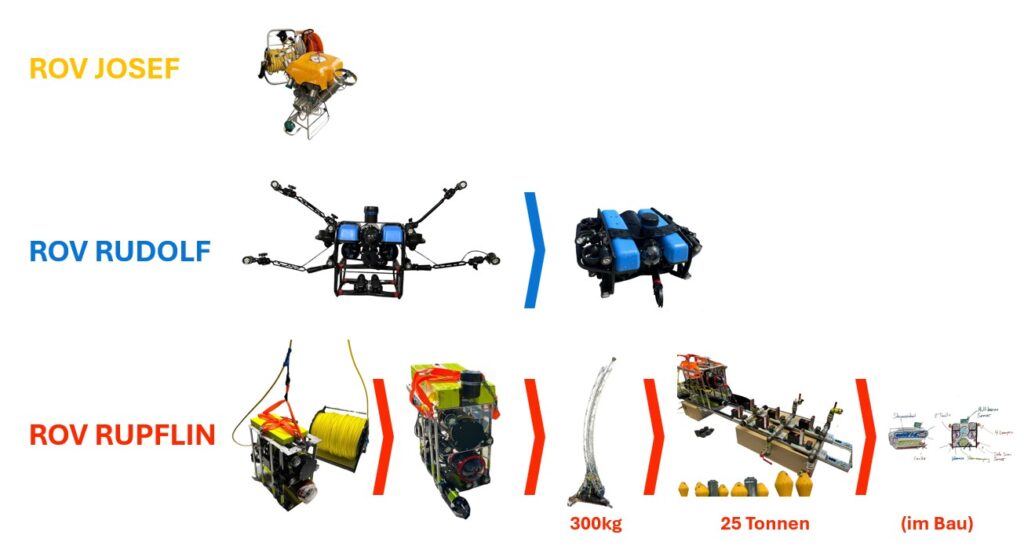
Unsere Tauchroboterfamilie: Josef, Rudolf und Rupflin wird laufend für unsere Bedürfnisse umgebaut, verbessert und neu programmiert. Sie sind unsere Augen und Hände in den Tiefen des Bodensees; ohne sie wäre das Projekt undenkbar.
Hier die technischen Details:
ROV Josef:
- Komplett analog gesteuert
- Oberflächenstromversorgung 230V AC
- Vier Propeller
ROV Rudolf:
- Drei Kameras
- Greifer
- Acht Lampen mit 12.000 Lumen
- Acht Propeller
- Sonar
- Oberflächenstromversorgung 400V DC
ROV Rupflin:
- Ursprünglich eine Hängekamera mit Licht und Kamera sowie zwei Propellern
- Später Erweiterung um Sonar und Greifer
- Umgebaut, um die 300 kg schwere Spülmaschine zu bewegen, mit zwei zusätzlichen grossen Propellern ausgestattet
- Die 5 Meter hohe Spülmaschine konnte über 13 Meter unter dem Wrack eine Lanze mit bis zu 170 bar Druck durchspülen und extrem viel Wasservolumen bewegen
- Danach umgebaut, um die 25 Tonnen schwere Bergeplattform zu bedienen, mit sechs Servomotoren und einer Oberflächenstromversorgung ausgestattet
- Da er nun mit der Bergeplattform auf 250 m liegt, wird ein Rupflin II gebaut
- Rupflin II wird neben den üblichen Kameras, Licht und Greifer auch ein Side-Scan-Sonar und ein Multibeam-Sonar haben und als erstes ROV unserer Flotte mit einem Unterwasser-Tracking (USBL) ausgerüstet sein (GPS funktioniert unter Wasser nicht).
Unser Tauchteam:
Um Vorbereitungsarbeiten in geringer Tiefe zu erledigen, wurde ein Pool von freiwilligen Tauchern zusammengestellt, die je nach Einsatz bei der Bergung mithelfen.
Geburtsstunde des Tauchteam Dampfschiff Säntis:


























Firmen die unser Projekt begleiten und unterstützen:


Ziel
Der Verein bezweckt die Schiffsbergung von Schiffen. Dazu gehört die Förderung bewährter Praktiken in der Schiffsbergungsindustrie, die Unterstützung bei der Lösung von technischen und rechtlichen Herausforderungen im Zusammenhang mit der Schiffsbergung, sowie die Bereitstellung von Ressourcen und Schulungen für ihre Mitglieder. Aktuell ist die Bergung des Dampfschiff Säntis das erste Ziel.
Leinen ziehen
Die Leinen wurden unter dem Wrack gezogen.

Bergung
Dritter Versuch mit Litzenheber

Konservierung in der Werft
Das Schiff wird nach der Bergung über 14 Wochen in der Werft in Romanshorn konserviert.
Über uns
Das Kernteam der Machbarkeitsstudie bestand aus einer Gruppe Enthusiasten, die unentgeltlich ihr Wissen, ihre Arbeitskraft, ihr Knowhow, ihre Werkzeuge und Fahrzeuge zur Verfügung stellten, um das Dampfschiff Säntis zu bergen und der Öffentlichkeit zugänglich zu machen. Die Kosten für Material belaufen sich bis zum Abschluss der Machbarkeitsstudie bei CHF 25‘000.-, wobei der Verwaltungsrat der SBS AG eine Spende von CHF 10‘000.- gesprochen hat. Der Schiffsbergeverein, Romanshorn wurde am 20. April 2023 gegründet. Am 21. April 2023 kaufte sich der Verein das Wrack des Schiffes DS Säntis mit sämtlichen Rechten und Pflichten für einen symbolischen Franken von der SBS AG. Silvan Paganini ist der Präsident des Vereins. Der Verein ist offen für gleichgesinnte Mitglieder, welche mithelfen, die vom Verein gesteckten Ziele zu erreichen.
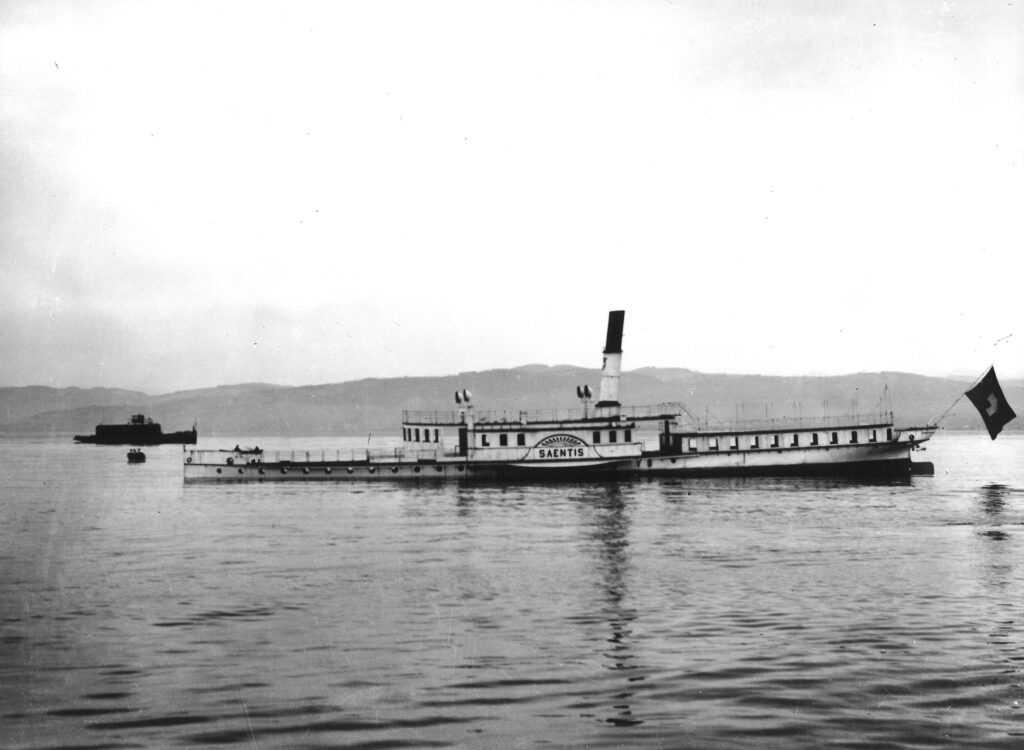
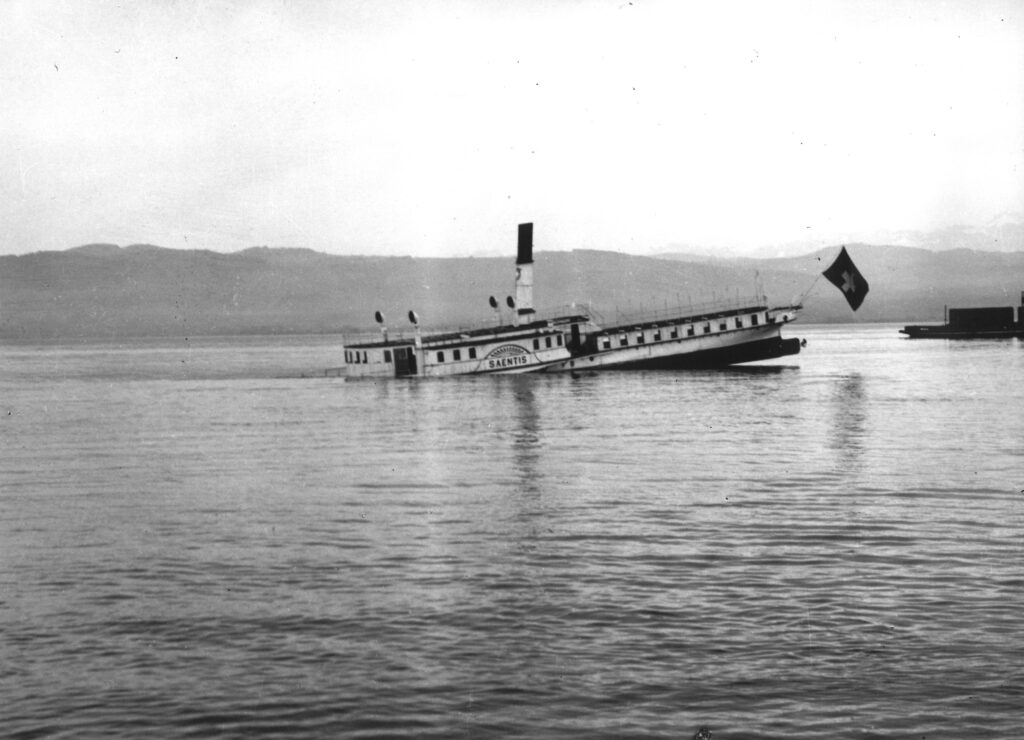
Dampfschiff Säntis
| Indienststellung: 1892 Heimathafen: Romanshorn, Schweiz Eigner: Schweizerische Nordostbahn (NOB) ab 1902 Schweizerische Bundesbahnen (SBB) ab 1997 Schweizerische Bodensee-Schifffahrt AG ab 2023 Schiffsbergeverein Erbauer: Escher Wyss & Cie, Zürich Länge: 49 m Breite über Alles: 10,90 m Breite zwischen den Spanten: 5.60m Seitenhöhe : 2.5m Verdrängung leer: 206,7 t Verdrängung beladen: 241.7t Tiefgang (leer): 1,36 m Maschinenleistung: 450 PS Geschwindigkeit: 26,0 km/h Tragkraft: 400 Personen Ausserdienststellung: 02.05.1933 (versenkt) Maschinenart: Schrägliegende 3-Zyl.-Nassdampf-Expansionsmaschine (Escher Wyss) Ab 1905 mit Heissdampf Antrieb: Schaufelräder mit 8 Eisenschaufeln Höchstgeschwindigkeit: 26 km/h |

“Dieses Projekt ist wie der Mount Everest, man kann ihn anschauen, planen, trainieren aber schlussendlich muss man in besteigen um zu wissen ob man es schafft.”
Silvan Paganini, Präsident Schiffsbergeverein
Neues
- Unterstützung aus Australien – Roboterarm
Unterstützung aus Australien – Roboterarm
Reach Robotics unterstützt unser Projekt, sprich unsere Aufräumaktion, mit einem vergünstigten Roboterarm. Als die Australier von unserer aktuellen herausfordernden Arbeit gehört haben, waren sie tief beeindruckt, wie wir das bisher mit einem simplen Greifarm geschafft haben.
Die aktuelle Herausforderung besteht darin, dass wir uns mit dem Tauchroboter nicht mehr frei bewegen können. Zum Beispiel können wir nicht mehr von Backbord nach Steuerbord des Wracks tauchen, da so viele Leinen den Weg versperren und teilweise überhängende Strukturen durchtaucht werden müssen. Das bedeutet, dass man immer auftauchen und dann auf der anderen Seite wieder abtauchen muss (mit dem neuen Unterwassertracking wissen wir immer genau, wo wir uns befinden). Dann geht es darum, Leinen zu schneiden.

Da wir die sechs Freiheitsgrade des Tauchroboters kontrollieren können, haben wir früher einfach den Tauchroboter so gedreht, dass ein einfacher Greifer ausreichte. Doch nun, wenn wir von Leinen umgeben sind, ist dies ein Himmelfahrtskommando, da wir uns sehr leicht einwickeln können. Darum muss der Tauchroboter möglichst stabil bleiben, und die sechs Freiheitsgrade muss der Greifarm für uns kompensieren. Der jetzige Arm wird dafür genutzt, sich für einige der Aufgaben an der Struktur festzuhalten. Damit kann man viel mehr Kraft erzeugen, als wenn der Tauchroboter freischwebend ist und nur die Kraft der Motoren zur Verfügung steht. Es ist also ein Aufräumen für Fortgeschrittene.
————————————————————————————————————————
- Was bisher geschah
Was bisher geschah
Wer zum ersten Mal von der Berichterstattung über das Projekt zur Bergung des Dampfschiffs Säntis gehört hat, sollte wissen, dass es drei Dokumentarfilme über die Entstehung der Idee gibt, produziert von CHMedia. Am Ende des Jahres wird ein weiterer Film von WeltTV bzw. N24 veröffentlicht. Heute wurde einer vom BR (bzw. ARD) veröffentlicht. Viel Spaß beim Schauen!

————————————————————————————————————————
- Tauchroboterfamilie
Tauchroboterfamilie
Unsere Tauchroboterfamilie, bestehend aus Josef, Rudolf und Rupflin, wird laufend für unsere Bedürfnisse umgebaut, verbessert und neu programmiert. Sie sind unsere Augen und Hände in den Tiefen des Bodensees; ohne sie wäre das Projekt undenkbar. Hier die technischen Details:

ROV Josef:
- Komplett analog gesteuert
- Oberflächenstromversorgung 230V AC
- Vier Propeller
ROV Rudolf:
- Drei Kameras
- Greifer
- Acht Lampen mit 12.000 Lumen
- Acht Propeller
- Sonar
- Oberflächenstromversorgung 400V DC
ROV Rupflin:
- Ursprünglich eine Hängekamera mit Licht und Kamera sowie zwei Propellern
- Später Erweiterung um Sonar und Greifer
- Umgebaut, um die 300 kg schwere Spülmaschine zu bewegen, mit zwei zusätzlichen großen Propellern ausgestattet
- Die 5 Meter hohe Spülmaschine konnte über 13 Meter unter dem Wrack eine Lanze mit bis zu 170 bar Druck durchspülen und extrem viel Wasservolumen bewegen
- Danach umgebaut, um die 25 Tonnen schwere Bergeplattform zu bedienen, mit sechs Servomotoren und einer Oberflächenstromversorgung ausgestattet
- Da er nun mit der Bergeplattform auf 250 m liegt, wird ein Rupflin II gebaut
- Rupflin II wird neben den üblichen Kameras, Licht und Greifer auch ein Side-Scan-Sonar und ein Multibeam-Sonar haben und als erstes ROV unserer Flotte mit einem Unterwasser-Tracking (USBL) ausgerüstet sein (GPS funktioniert unter Wasser nicht)
Ultra Short Baseline (USBL):
USBL ist ein Unterwassernavigationssystem, das auf der Laufzeit von Schallwellen zwischen dem Objekt und mehreren Bezugspunkten basiert. USBL-Systeme werden benutzt, um die Position von Objekten oder Geräten unter Wasser zu bestimmen.Unser USBL-System besteht aus drei Hydrophonen, die an Bojen an der Oberfläche installiert sind, wobei jede Boje auch mit einer GPS-Antenne ausgerüstet ist. Der Rupflin II unter Wasser verfügt über einen Sender (Beacon), der ein akustisches Signal aussendet. Dieses Signal wird von den Hydrophonen aufgenommen und an Bord des Schiffs ausgewertet.
Die Entfernung zum Objekt ergibt sich aus den absoluten Laufzeiten, basierend auf der bekannten Schallgeschwindigkeit. Die Zeitunterschiede, mit denen das Signal die einzelnen Hydrophone erreicht, erlauben die Bestimmung der Einfallsrichtung der Schallwellen in Bezug auf die drei Hydrophone. Änderungen dieser Richtung beruhen nicht nur auf den tatsächlichen Bewegungen des Objekts, sondern auch auf Stampfen und Rollen der Bojen, welches deshalb mit Inertialsensoren ausgestattet ist.
Die relative Position bezogen auf die Hydrophone kann in eine absolute Position (relativ zum Grund) umgerechnet werden, wenn der Ort und die Orientierung der Hydrophone bekannt sind, bei uns durch Satellitennavigation.
Durch thermohaline Schichtung und entsprechende Variation der Schallgeschwindigkeit weicht die Einfallsrichtung der Wellenfronten von der Richtung zum Objekt ab, insbesondere beim Durchgang von internen Wellen. Bei einem großen, exakt vermessenen Array von Hydrophonen am Grund spricht man von einem Long-Baseline-System (LBL); dieses wird jedoch in unserem Projekt nicht eingesetzt.
————————————————————————————————————————
- Alle guten Dinge sind drei: Ein neuer Anlauf zur Bergung des Dampfschiffs Säntis
Alle guten Dinge sind drei: Ein neuer Anlauf zur Bergung des Dampfschiffs Säntis
Romanshorn, 08.06.2024 – Wie Albert Einstein sagte: „Wer noch nie einen Misserfolg hatte, hat noch nie etwas Neues versucht.“ Der Schiffsbergeverein wagt einen dritten Versuch, das Dampfschiff Säntis zu bergen. Damit beginnt man fast auf dem ersten Spielfeld, da die Bergeplattform zerstört wurde. Nur die vier Hebeleinen, die unter dem Wrack noch liegen, und eine Menge Erfahrung bleiben.Trotz zahlreicher Hindernisse wie einem Spendekrimi im letzten Jahr, bei dem während einer viermonatigen Crowdfunding-Kampagne die Finanzierungsschwelle erst wenige Stunden vor Ablauf der Aktion erreicht wurde, widrigem Wetter, starken Unterwasserströmungen, Personalengpässen, bürokratischen Genehmigungen und technischen Herausforderungen hat das Team des Schiffsbergevereins das Projekt „Hebung des Dampfschiffs Säntis“ mit grosser Entschlossenheit vorangetrieben. Am Sonntag, den 26. Mai 2024, kam es jedoch zu einem Vorfall, der die Bergung scheitern liess, als die Bergeplattform zerstört wurde.
Der Schiffsbergeverein hat aufgrund der überwältigenden Resonanz aus der Bevölkerung aller drei Anrainerstaaten beschlossen, einen neuen Anlauf zu wagen. Dabei werden die beiden wichtigsten Lektionen aus den bisherigen Versuchen berücksichtigt:
- Ein derart komplexes Projekt kann nicht ausschliesslich mit Freiwilligen durchgeführt werden. Professionelle Unterstützung ist unerlässlich.
- Es müssen ausreichend finanzielle Ressourcen vorhanden sein, um das richtige Material zu beschaffen und den reibungslosen Ablauf der Bergung zu gewährleisten. Beim neuen Anlauf würden Litzenheber eingesetzt.
Der Verein ist zuversichtlich, dass wir mit diesen Anpassungen und der anhaltenden Unterstützung der Öffentlichkeit das Dampfschiff Säntis erfolgreich bergen können. Als erstes beginnt nun das Crowdfunding erneut mit der Raiffeisenbank auf www.lokalhelden.ch/bergung-saentis . Auch die Bank hat zugesichert, dass die normale maximale Spendensammelzeit von drei Monaten bis zum 31. Januar 2025 verlängert werden kann. Wir sind gespannt, ob wir es schaffen werden.
————————————————————————————————————————
- Ende der Bergungsbemühungen des Dampfschiff Säntis
Ende der Bergungsbemühungen des Dampfschiff Säntis
Romanshorn, 27. Mai 2024 – Die Bergung des Dampfschiffs Säntis wurde nach intensiven Bemühungen des Schiffsbergevereins eingestellt. Das Schiff, das einst stolz über den Bodensee dampfte, war in den letzten Monaten zum Mittelpunkt einer aufwendigen Bergungsaktion geworden. Doch trotz aller Anstrengungen und Hoffnungen konnte das Wrack letztendlich nicht geborgen werden.
Das Dampfschiff Säntis, einst ein Symbol für Eleganz und technologischen Fortschritt auf dem Bodensee, hatte eine lange Geschichte hinter sich. Sein Schicksal nahm eine tragische Wendung, als es nach dem Ende seiner Dienstzeit versenkt wurde. Der Schiffsbergeverein in Romanshorn hatte sich zum Ziel gesetzt, das Schiff mit dem seltenen Dreizylindermotor zu heben. Trotz des Einsatzes moderner Technologie und der unermüdlichen Arbeit des Vereins blieb das Wrack jedoch auf dem Seegrund zurück. Die Kosten und Risiken für die beteiligten Personen stiegen, während die Chancen auf Erfolg sanken. Nach mehreren technischen Rückschlägen beschlossen die Verantwortlichen schweren Herzens und nach reiflicher Überlegung, die Bergung einzustellen.
Trauer und Enttäuschung: Die Reaktionen auf das Bergungsende
Die Nachricht löste bei allen direkten Beteiligten eine Mischung aus Trauer und Enttäuschung aus. Auch Gönner und Fans, die für die Protagonisten des Vereins immer ein starker Rückhalt waren, werden diesen Entscheid ebenfalls bedauern. Am Schluss ist die rationale Entscheidung nachvollziehbar. Der Verein hat stets betont, nur so lange weitermachen zu wollen, wie die Risiken und Kosten kalkulierbar und im Verhältnis zur Konservierung dieses grossartigen Schiffes vertretbar blieben. Der Einsatz der Hebesäcke wurde stets als kostengünstigste, aber riskante Methode betrachtet. Für den Einsatz der sicheren Litzenheber hatte der Verein während des Crowdfundings im letzten Jahr jedoch nicht genügend Spenden sammeln können. Jetzt geht es darum, das Bergematerial wieder aus dem See zu entfernen.
Das Vermächtnis des Dampfschiffs Säntis
Die Bergung des Dampfschiffs Säntis mag zwar gescheitert sein, aber ihr Vermächtnis wird nicht vergessen werden. Es wird weiterhin als Mahnmal dienen, das an die Gefahren und Herausforderungen erinnert, mit denen die Seefahrt konfrontiert war, und an die Tapferkeit und Opferbereitschaft derjenigen, die ihre Lebenszeit ihr gewidmet haben. In den kommenden Jahren werden möglicherweise weitere Bemühungen unternommen, das Wrack zu bergen und seine Geheimnisse zu enthüllen. Doch selbst wenn dies nie geschieht, wird das Dampfschiff Säntis in Erinnerung bleiben als ein Symbol für die Unberechenbarkeit des Bodensees und für die Endlichkeit des menschlichen Strebens.
————————————————————————————————————————
- Juli 2024
- Juni 2024
- Mai 2024
- April 2024
- März 2024
- Februar 2024
- Januar 2024
- Dezember 2023
- November 2023
- Oktober 2023
- September 2023
- August 2023
- Juli 2023
- Juni 2023
- Mai 2023
- April 2023
Neue Mitglieder
Der Eintritt in den Verein kann jederzeit erfolgen (gemäss Statuten). Aufnahmegesuche sind an den Vorstand zu richten (siehe Formular unten), über die Aufnahme entscheidet der Vorstand endgültig.
An der Mitgliederversammlung vom 12. Juni 2023 wurde der Mitgliederbeitrag auf CHF 50.- pro Jahr festgelegt.
Aufnahmegesuch:
Bankdaten des Vereinskonto:



Es ist immer noch eine Reise ins Ungewisse
Impressum – 2024 – Schiffsbergeverein