🆕 Der zweite Tauchroboter für die Schiffsbergung steht bereit
Bis jetzt hat die Hauptlast des Projekts der Tauchroboter mit dem Namen Rupflin erledigt. Der Name Rupflin erinnert an den Matrosen, der bei einer Schiffskollision im Jahr 1864 auf dem „DS Jura“ vor Bottighofen tragisch ums Leben kam (die gesamte Geschichte ist in der Bildstrecke zu finden).
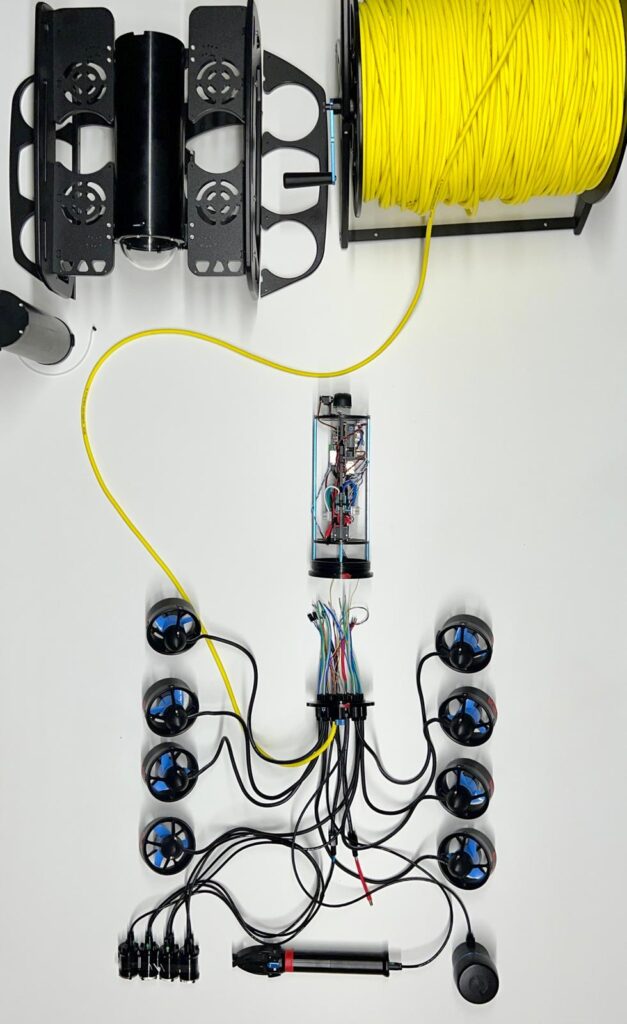

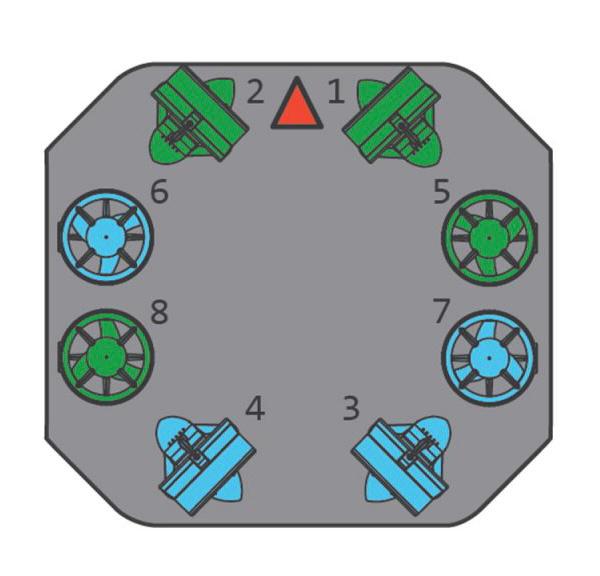


Aus Gründen der Redundanz bekommt der Tauchroboter Rupflin Verstärkung. Dieser zweite Tauchroboter verfügt über acht Antriebe, die vektorisiert angeordnet sind (die blauen drehen im Uhrzeigersinn, die grünen gegen den Uhrzeigersinn). Darüber hinaus sind vier Lampen 💡, Greifer 🦾, ein 360-Grad-Sonar 📡, eine schwenkbare Kamera 🎥, Wassersensoren 💦, Drucksensoren 🗯, Stromversorgung 🔋, Stromüberwachung 🔍, ein Bordcomputer 💻, ein Kompass 🧭, eine Fernbedienung 🎮, ein Anzeigegerät 🖥 und natürlich 300 Meter Kabel 🔌 an Bord.
Der Tauchroboter bietet volle Kontrolle über alle sechs Freiheitsgrade.
Ausserdem verfügt er über einstellbare Verstärkungsstufen, die es dem Piloten ermöglichen, präzise Steuerungen bei extrem niedrigen Geschwindigkeiten vorzunehmen und gleichzeitig hohe Leistungen zu erbringen, um Strömungen zu überwinden und schwere Lasten zu tragen. Dies ist ein wichtiger Schritt vorwärts für das Schiffsbergungsprojekt.